3D Point Cloud Media Processing Technology
Background
NTT aims to predict the future by collecting detailed real-time information in four dimensions (latitude, longitude, altitude, and time). We call this the 4D Digital Infrastructure. On the 4D Digital Infrastructure, we can integrate advanced geospatial information databases and sensing data on people and objects. We can perform advanced forecasting, analysis, and simulation in multiple industrial fields. This infrastructure will provide road traffic rectification. This infrastructure will make it easier to maintain and manage our social infrastructure.
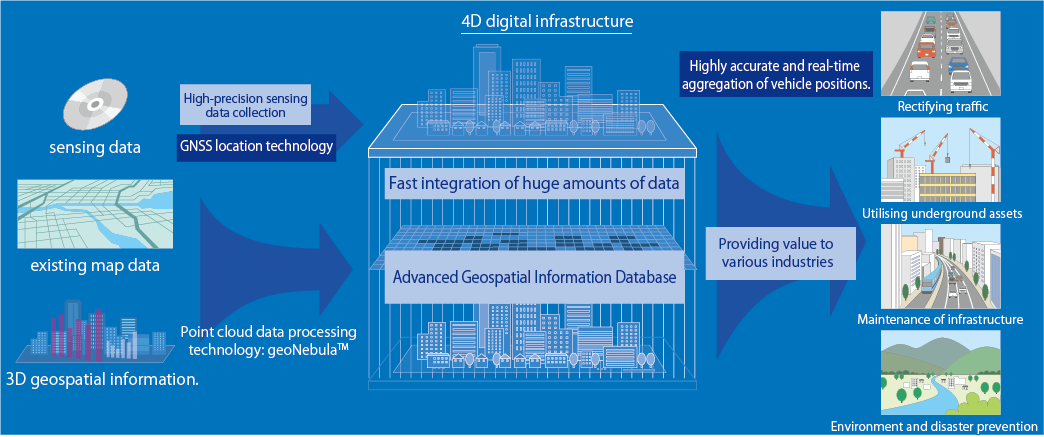
Fig. 1. 4D Digital Infrastructure.
Construction of Cyberspace
To maintain an advanced geospatial information database, we must continue to gather data from real space using LiDAR and other methods. This process generally follows the following flow.(1) Sensing and restoration: We scan the real space with LiDAR, cameras, etc., mounted on vehicles, aircraft, etc. We can digitally restore the real space by integrating and formatting the collected data.(2) Recognition: We manually add information on objects' position, shape, and attributes to the measured data.(3) Compression and structuring: We compress and store the measured data.
We are researching techniques to make each step more efficient. We call this technology geoNebula, 3D point cloud media processing.
3D point cloud media processing geoNebula.
(1) Sensing and restoration: In a 3D point cloud, there is a gap of a certain width between spatially adjacent points. We want to construct 3D point cloud data with higher resolution. We are researching "3D data high-resolution technology," which interpolates new points for this gap. We are also researching technology to integrate multiple 3D point cloud data to restore a wide-area environment efficiently.
(2) Recognition: 3D point clouds provide physical locations and shapes. However, it cannot show semantic information such as object types and attributes. We want to perform retrieval and advanced analysis using semantic information. We are developing a technology to automatically assign semantic labels (e.g., "road surface," "building," etc.) to each point.
(3) Compression and structuring: The data size of 3D point clouds is huge. Storage and transmission costs are very high. We are researching technology to compress, store, and save 3D point cloud data. To process the data with low memory and high speed, we need to process the data in a compressed format. We are researching techniques to combine 3D point cloud data and detect changes in the compressed format.
Future Work
We want to establish technology to construct cyberspace that precisely reproduces real space in the future. And we will build an ultra-realistic metaverse.